机械安全 安全防护的实施准则 GB/T 30574-2021
- 制定机关:国家市场监督管理总局 国家标准化管理委员会
- 公布日期:2021-12-31
- 法规文号/标准号:GB/T 30574-2021
- 施行日期:2022-07-01
机械安全 安全防护的实施准则 GB/T 30574-2021 -环安宝@法规宝
C.1 概述
本附录基于人体部位接近速度数值的参数给出了从探测区或安全防护装置的致动装置到危险区的最小距离计算方法。
注:与最小距离计算相关的术语和定义见 GB/T19876。
C.2 最小距离通用计算公式
最小距离按公式(C.1)计算:
 式中:
式中:
S ———最小距离,单位为毫米(mm);
K———根据人体或人体部位接近速度数据导出的参数,单位为毫米每秒(mm/s);
T ———全系统停机性能,单位为秒(s);
C ———侵入距离,单位为毫米(mm);
Z ———安全系数补偿,单位为毫米(mm)。
C.3 接近速度(K)
K 是一个速度参数值,是指人体或人体部位接近危险区的移动速度。在确定 K 值时,应考虑以下因素:
———手和手臂的移动;
———肩部或身体扭动;
———弯腰;
———步行。
接近速度(K)值通常取1600mm/s,但在某些情况下取值也可能大于1600mm/s,见
只有风险评估确认有效且做了明确记录,并且通过建模和试验验证可将风险减小至可接受水平,接近速度(K)值才能小于1600mm/s。
C.4 全系统停机性能
C.4.1 一般要求
全系统停机性能至少由两个阶段组成。两个阶段的关系用公式(C.2)表示:
 式中:
式中:
T ———全系统停机性能;
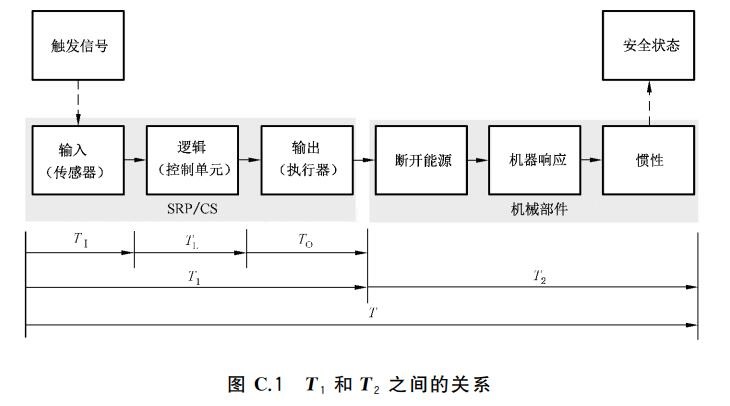
T1 ———启动安全防护装置到机器控制系统发出停机信号的最长时间;
T2 ———停机时间(即机器收到停机信号后终止危险机器功能所需要的最长时间)。T2 应包含机器控制系统的响应时间。
T1 和T2 分别是SRP/CS和机器停机性能的函数。在确定和计算T1 和T2 时宜考虑诸如温度、阀门开关时间、元件老化等各种因素的影响。
图 C.1示出了T1 与T2 之间的关系。T1 和T2 的时长由设计确定,并通过测量进行评价。对 T1和T2 进行评价时,宜考虑因测量、计算和/或结构造成的不确定度。
T1 通常可根据SRP/CS的组成,分别确定SRP/CS的传感器(输入)响应时间(TI)、SRP/CS的控制单元(逻辑)响应时间(TL)和SRP/CS的执行器(输出)响应时间(TO),T1 按公式(C.3)计算:
式中:
TI ———SRP/CS的传感器(输入)响应时间;
TL ———SRP/CS的控制单元(逻辑)响应时间;
TO ———SRP/CS的执行器(输出)响应时间。
 C.4.2 传感器响应时间
C.4.2 传感器响应时间
传感器响应时间(TI)是安全防护装置的传感器(如光幕、压敏垫、压敏边等)检测到人员或人体部位存在,或者人体部位不存在(通过双手按钮发出)等信号到状态改变的延迟时间。TI 的值由制造者给出。
C.4.3 控制单元响应时间
控制单元响应时间(TL)是安全控制系统的控制单元(如安全继电器等)检测到来自传感器的信号到状态改变的延迟时间。TL 的值由制造者给出。
C.4.4 执行器响应时间
执行器响应时间(TO)是安全控制系统的控制单元(如安全继电器等)发出的信号到执行器失能的延迟时间。
C.4.5 机器响应时间
机器的响应时间(T2)为下列时间之和:
———断开离合器的时间;
———施加制动的时间;
———将危险运动制动直至安全状态的时间。
C.5 侵入距离
侵入距离(C)与如何使用安全防护装置有关,是指人体部位(通常是手)在安全防护装置启动之前越过安全防 护 装 置 向 危 险 区 移 动 的 距 离。针 对 特 定 类 型 和 特 定 配 置 的 保 护 装 置,侵 入 距 离 C 见GB/T19876—2012中第6章~第9章。
C.6 安全系数补偿(Z)
根据安全防护装置的具体应用,可能某些应用需要进行安全系数补偿。
安全防护装置的制造者应给出有关安全系数补偿(Z)的指南。
下面给出根据下列应用场合所做的安全系数补偿(Z)及其计算示例:
———测量误差(ZM );
———反射测量误差(ZR)(对于采用反光镜的有源光电保护装置,此补偿系数是必需的);
———运动设备离地高度补偿(ZF)(在光电保护装置检测到脚部以上的人体部位并发出停机指令时,并未考虑脚的高度,因此,在运动设备没有足够的离地高度时,脚部可能受到伤害);
———运动设备制动系统制动性能下降补偿(ZB)。
在计算最小距离时,安全系数补偿Z 按公式(C.4)计算:
- 上一节: {{previousInfo.title}} 没有了
- 下一节: {{nextInfo.title}} 没有了